



Виталий Тихонин
Обучение двигательным действиям спортсменов в прыжках в высоту
ВВЕДЕНИЕ
В 1947 году появилась наука об управлении и связи в машинах и живых организмах, названная ее создателем Н. Винером кибернетикой. Эта наука объединяет различные области знаний и человеческой деятельности, где имеют место процессы управления. К ним относится и управление движениями. Сохраняя все черты, присущие физиологии движений, управление движениями использует в то же время ряд общих кибернетических принципов. Кибернетика имеет прикладную направленность и представляет собой, по выражению бельгийского ученого Л. Куффиньяля, искусство эффективного действия.
Возросшее за последнее время внимание к научной организации труда, спортивной тренировки и многих других областей деятельности человека, обусловленной применением сложных и устойчивых двигательных навыков, повысило значение исследований в области координации движений. Потребовалась разработка теоретических позиций, призванных не только объяснить многие накопившиеся за десятилетия факты, но и служить основой для решения важных практических задач, связанных со становлением совершенствованием и переносом двигательных качеств человека.
Еще в древние времена ученых – анатомов, врачей, философов интересовал вопрос о причинах движений человека. В начале нашей эры уже была ясна сократительная функция мышц и роль двигательных нервов. Не трудно было понять, для чего совершаются движения, но неясны были причины, их вызывающие. Так же как для объяснения всех непонятных явлений, и здесь прибегали к помощи непознаваемого божества, которое повелевает человеком и руководит его действиями. Лишь в XVII веке была сделана первая попытка материалистически объяснить причины движений человека. Р. Декарт создал основу рефлекторной теории, показав, что причиной движения может быть конкретный фактор внешней среды, воздействующий на органы чувств. Этим, однако, объяснялось происхождение лишь одного вида движений – непроизвольных движений. Рефлекторная природа произвольных движений была показана И.М. Сеченовым в конце прошлого века. В дальнейшем произвольные движения по ряду признаков были отнесены И.П. Павловым к условным двигательным рефлексам, а непроизвольные – к безусловным.
В прошлом веке было сделано важное открытие, сыгравшее определяющую роль в представлениях о механизмах управления движениями. Английский ученый Ч. Бэлл установил, что помимо двигательных нервов к мышцам подходят также чувствующие нервы. Он очень точно усмотрел значение афферентной иннервации мышц как вида связи, несущей сообщения в центры о событиях, происходящих на периферии и необходимых для коррекции центробежных импульсов.
Открытие Ч. Бэлла не прошло незамеченным, и многие исследователи по-разному использовали его в изучении двигательной функции. Но никто не понял значения мышечной чувствительности так глубоко физиологически и психологически, как И.М. Сеченов. И теперь, более чем через 100 лет после написания им "Рефлексов головного мозга", приходится поражаться тому, насколько правильны и точны с позиций самой современной науки его высказывания о роли двигательных ощущений в управлении движениями в пространстве и во времени, о взаимодействии двигательных ощущений с зрительными и слуховыми.
Вся совокупность физиологических представлений о механизмах, лежавших в основе двигательных актов животных и человека, среди которых все больше подчеркивалось значение двигательной афферентации, явилась основой для широких обобщений о сущности управления движениями, представленных в работах советских физиологов Н.А. Бернштейна и П.К. Анохина.
ГЛАВА I. ОБУЧЕНИЕ ДВИГАТЕЛЬНЫМ ДЕЙСТВИЯМ СПОРТСМЕНОВ НА ОСНОВЕ СИСТЕМНОГО ПОДХОДА
1.1. Динамическая устойчивость и биомеханическая целесообразность движений
В учебном пособии рассматриваются частные физические (биомеханические) факторы, определяющие задачи координации движений. Рассмотрим ряд вопросов связанных с движением в целом. Известно, что любое произвольное движение содержит смысловую сторону. В данном случае под этим понимаются те цели, которые стоят перед движением.
Однако, какова бы ни была смысловая сторона движения, оно выполняется определенными мышечными синергиями, деятельность которых человек большей частью не улавливает. Его в первую очередь интересует качество выполнения движений. Это, в сущности, и составляет прикладную цель исследований по координации произвольных движений, исследований, связанных не только с теорией вопроса, но и с широким комплексом педагогических проблем (становление, совершенствование и перенос двигательных навыков).
Стремление определить биомеханические качества выполняемого движения и дать им определенную оценку привело к установлению понятия динамической устойчивости движения. Под ним должно пониматься настолько освоенное движение, что оно выполняется с минимальными мышечными затратами и протекает по устойчивым траекториям как в целом, так и в деталях. Устойчивыми же траекториями нужно считать такие, которые при многократном повторении легко воспроизводятся исполнителем с необходимой точностью в пространстве и времени.
Естественно, что до такого совершенства должен быть доведен любой двигательный навык (а вся теория вопроса должна служить именно этому). Для этого необходимо, чтобы все важнейшие реактивные силы, которые возникают в звеньях конечностей при выполнении данного движения, принимали прямое и положительное участие в нем (т.е. способствовали его правильному осуществлению). Это, в свою очередь, требует освобождения всех необходимых степеней свободы и, наконец, точного соответствия мышечных усилий условиям, требуемым силовым полем движения. Данные условия должны быть соблюдены не только в начале движения, но и во всем его ходе. Отсюда вытекает определение понятия координации движений в целом.
По Н.А. Бернштейну, «координация движения есть преодоление избыточных степеней свободы движущегося органа и превращение его в управляемую систему». Следует, однако, учесть, что речь идет не о фиксации избыточных степеней свободы, а именно об использовании их для самого движения.
Н.А. Бернштейн показал (1940), что для того, чтобы добиться динамически устойчивого движения (т.е. освоить новый навык), центральная нервная система последовательно осуществляет три ступени его регулирования в биомеханическом аспекте.
1-я ступень: начальная фаза освоения двигательного навыка. В кинематической цепи посредством мышечной фиксации связаны все основные излишние степени свободы, с целью исключить реактивные силы, мешающие произвести движение хотя бы по приблизительно правильной траектории. Движение в целом – скованное и тяжелое.
2-я ступень: промежуточная фаза. После некоторого освоения движения ряд степеней свободы последовательно высвобождается, так как реактивные силы в целом меньше сбивают его, а мешающие гасятся короткими импульсами мышечных усилий. Само движение протекает легче и увереннее, чем на первой стадии.
3-я ступень: заключительная фаза. Окончательно освоенное движение использует не только мышечные усилия, но и реактивные силы соседних звеньев, базируясь на полном высвобождении требуемых степеней свободы.
В этом отношении освоение движения, в свою очередь предъявляет центральной нервной системе ряд сложных задач, решение которых требует очень большой гибкости ее деятельности при становлении координации движений. В частности, очень важна биомеханическая целесообразность движений.
Этим термином обозначаются такие динамические составляющие структуры движений, которые, независимо от того, насколько они выражены, возникают вследствие необходимости выполнить движение наиболее выгодным образом. Такие составляющие часто и не осознаются лицом, выполняющим навык, но в той или иной форме существуют в структуре движения. Обнаруживаются они не всегда. Легче всего их можно проследить на таких навыках, которые осуществляются на максимальных нервно-мышечных напряжениях. Однако при соответствующем анализе биомеханическая целесообразность мышечных напряжений и вообще динамических составляющих прослеживается даже на таких высокоавтоматизированных навыках как ходьба.
Из всего изложенного ясно, что управление произвольными движениями человека представляет собой очень сложную задачу из-за сложности и изменчивости силового поля движений, громадное количество степеней свободы, наличия реактивных сил, сложной взаимосвязи и, главное, неоднозначности связи между мышечным напряжением и результирующим движением, ауксотоничности в работе мышц.
Речь идет о том, чтобы ряд принципиально самонеуправляющихся кинематических цепей превратить в управляемую систему. Естественно, что для решения этой задачи должен существовать тщательно дифференцированный аппарат, прошедший определенную школу эволюции и способный к выполнению любых вариантов, выдвигаемых жизнью.
1.2. Организация и управление формированием произвольных движений
Попытаемся представить себе ход центральной регуляции произвольных движений с учетом не только узко-физиологических, но и физических (биомеханических) факторов (рис.1).
В этой проблеме слишком много неизученного, чтобы в данное время можно было составить такую схему без известной доли гипотетичности. Однако при рассмотрении узловых положений можно опираться на установившиеся физиологические закономерности и важнейшие принципы работы управляющих систем. Все сказанное ниже относится только к общей функциональной стороне вопроса, так как морфологических и физиологических доказательств еще недостаточно.
Первой, наиболее фундаментальной, закономерностью в координации движений является наличие «кольца управления» – зависимость не только управляемого звена от управляющего (прямая связь), но и наоборот (обратная связь).
Исходя из динамической сложности произвольных движений, следует считать, что осуществление координации движений невозможно без того, чтобы центральная нервная система не имела необходимой информации о том, что происходит на периферии. Существование этого информационного аппарата не отвергается никем из современных физиологов, которые называют подобный процесс проприоцептивной афферентацией, или, по П.К.Анохину, обратной афферентацией. Речь может идти о роли и значении этого аппарата, который на наш взгляд, в известной мере недооценивался многими исследователями.
Известно также, что при одновременных нарушениях экстро- и проприоцептивной сигнализации невозможно рациональное выполнение достаточно сложного произвольного движения. Остается предположить, что управление такими движениями осуществляется по замкнутому циклу: мозг – центробежные нервы – мышцы – проприоцепторы – центростремительные нервы – мозг. В этом цикле участком прямой связи будет: мозг – мышцы, а обратной связи – мышцы – мозг.
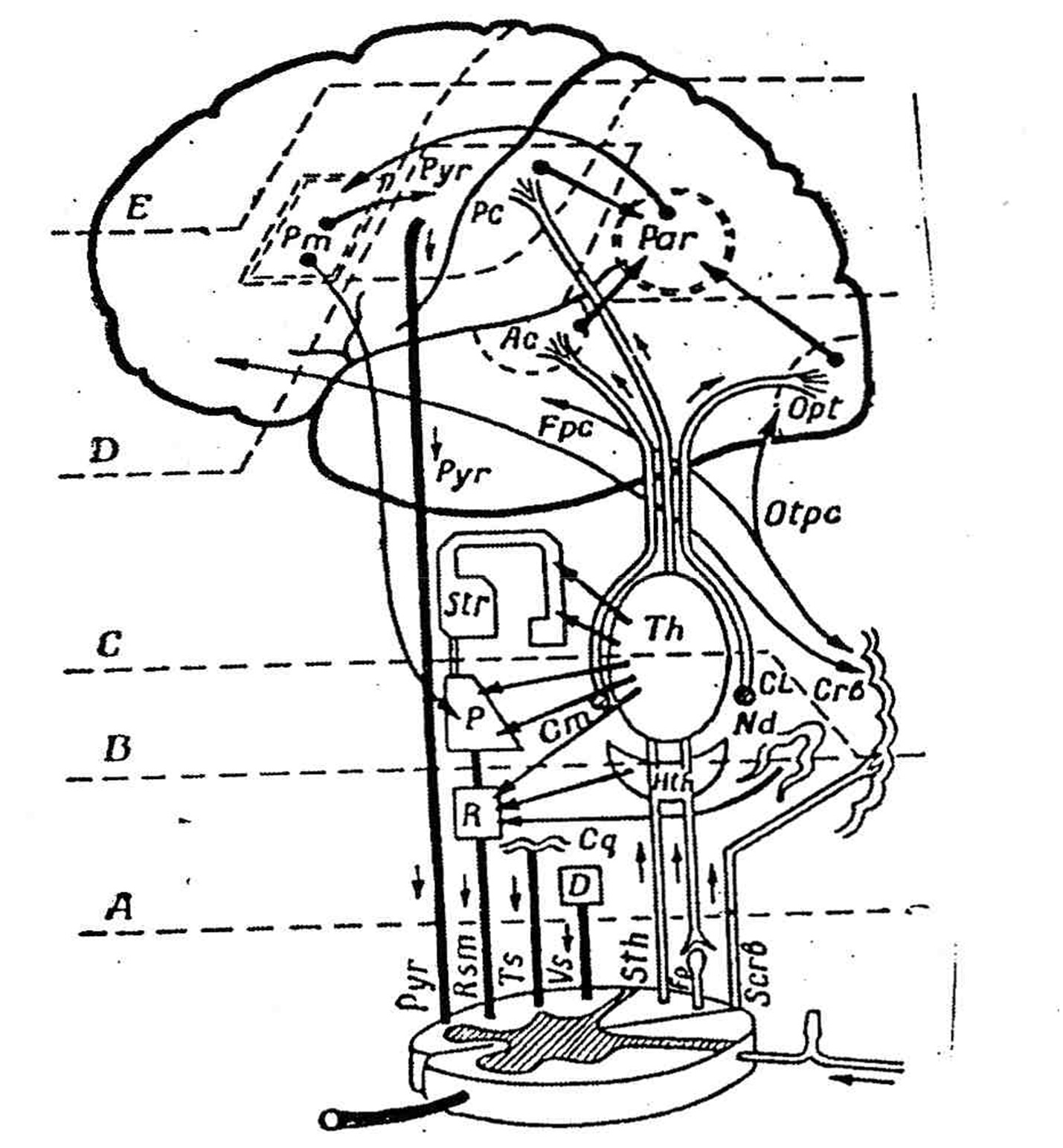
Рис. 1. Схема расположения основных ядер и проводящих путей центральной нервной системы человека (по Н.А. Бернштейну, 1947)
Однако при более детальном рассмотрении возникает первое разделение этого кольца на внешнее и внутреннее. Внешнее кольцо включает прямую связь и внешнюю дугу обратной связи по зрительным, слуховым, обонятельным и тактильным рецепторам, имеющим смысловую афферентацию (Н.А. Бернштейн, 1947), и непосредственно связанным с восприятием внешнего мира. Внутреннее кольцо включает прямую связь и внутреннюю дугу обратной связи по проприоцепторам, непосредственно не связанным с нашим сознанием.
Таки образом, общей частью колец является прямая связь (мозг – мышцы). Это разделение колец весьма принципиально и вместе с тем относительно; они играют различную роль в управлении произвольными движениями. Следует полагать, что внешнее кольцо осуществляет контроль за смысловой стороной движения, а внутренне – за синергетическими автоматизмами. Однако, как будет показано ниже, их функции могут в известной мере и в определенных случаях изменяться, частично взаимно переключаться. Разделение их функций относительное.
Высшие отделы центральной нервной системы имеют сравнительно малую афферентационную связь с мышечной периферией, а низшие, напротив, в полной мере обладают ею (О.Фогт).
Для иллюстрации этого приводится на рисунке 1 схема, взаимствованная из книги Н.А.Бернштейна «О построении движений» (1947). Как показано на схеме, из мозга на периферию ведут: пирамидный путь (Pyr), начинающийся в высших отделах, и группа экстрапирамидных (Rsm – руброспинальный, Ts – тектоспинальный, Vs – вестибулоспинальный), начинающихся в низших отделах; из периферии к центру идет только одна группа путей (Sth – спиноталамический, Fp – заднестолбовой, (Scrb – спиноцеребральный), они заканчиваются в низших отделах. Пути Fpc – фронтопонтоцеребелярный и затылочновисочнопонтоцеребелярный соединяют верхние отделы мозга с мозжечком. Одновременно на схеме приведено возможное распределение основных ядер мозга по уровням: R – красное ядро; D – ядро Дейтерса; Cq – четверохолмие; Hth – гипоталамус; Nd – зубчатое ядро; P – паллидум; Cm – внутреннее и Cl – наружное коленчатое тело; Crb – кора мозжечка; Str – стриатум; Th – зрительный бугор; Pm – премоторная зона коры; Pyr – пирамидная область; Pc – постцентральная извилина; Ac – слуховая зона; Opt – зрительная зона; Par – теменная область. Стрелками обозначены связи между отдельными ядрами, пунктирными линиями отмечено возможное расположение уровней управления движениями.
Можно полагать, что во внешнее кольцо управления информация о ходе конкретных синергетических деталей движения обычно при освоенном навыке не поступает, так как обратной связью с отдельными мышечными единицами оно не связано (О.Фогт). Это, а, следовательно, и контроль за такими деталями, естественно, остается за низшими отделами центральной нервной системы, которые, входя во внутренне кольцо управления, как раз и меняют необходимые пути. Во внешнее кольцо могут попасть только суммированные сигналы, сенсорные синтезы, которые отражают более общий, а не детальный ход движения.
Такое разделение функций наблюдается при выполнении хорошо освоенного движения. Если же выполняется незнакомое человеку движение и низшие отделы еще не подготовлены полностью к управлению им, то высшие осуществляют контроль за смысловой стороной движения и наблюдение за деталями движения изменяет сам его смысл.
Конкретные синергетические детали либо остаются вне контроля, либо становятся объектом внимания и тогда входят в смысловую сторону движения. Поскольку высшие центры выполняют в этих условиях две функции, из которых одна им явно не свойственна, они могут осуществить их только в весьма примитивном виде, контролируя ход движения преимущественно при помощи внешних рецепторов, т.е. внешней обратной связи. В результате само движение тоже окажется выполненным примитивно. Это явление наблюдали все осваивающие новый двигательный навык.
Полноценный контроль за всеми конкретными деталями движения (а, следовательно, и его качественное выполнение) происходит лишь после того, как низшие отделы образуют соответствующие связи между клетками и центрами и сделают действенной внутреннюю обратную связь. Таким образом, в управление движением будет включено внутреннее кольцо и за высшими отделами (т.е. за внешним кольцом) останется только их прямая задача – контроль за смысловой стороной движения.